

Recuperar habilidades motoras tras neurotrauma. Un enfoque innovador para la recuperación de habilidades motoras después de sufrir un neurotrauma es el uso de exoesqueletos robóticos. Estos dispositivos han demostrado ser efectivos en la rehabilitación y mejoramiento de las actividades diarias para personas que han experimentado accidentes cerebrovasculares o lesiones del plexo braquial. Sin embargo, enfrentan desafíos al intentar restaurar la destreza necesaria para tocar instrumentos musicales.
En este contexto, se ha llevado a cabo una investigación centrada en un exoesqueleto de mano robótica suave, combinado con algoritmos de aprendizaje automático, con el objetivo de ayudar a las personas a reentrenarse en el arte de tocar el piano.
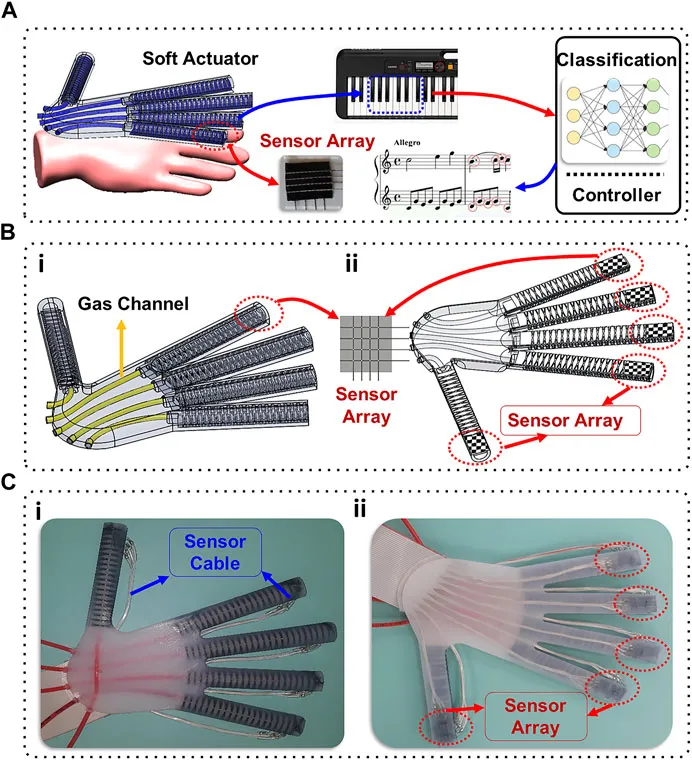
Este exoesqueleto cuenta con una tecnología especial que permite detectar y distinguir entre versiones correctas e incorrectas de una misma canción. Para lograr esto, se utilizan sensores táctiles piezorresistivos con 16 puntos de contacto en las puntas de los dedos.
El diseño del exoesqueleto de mano se ha concebido como una unidad única
Para ello se ha utilizado un material llamado ácido polivinílico (PVA) como soporte estructural. Posteriormente, este material se disuelve, creando cámaras de presión internas para cada uno de los cinco dedos, los cuales pueden ser accionados de forma individual.
Para clasificar las diferentes versiones de la canción, se han entrenado algoritmos como Random Forest (RF), K-Nearest Neighbor (KNN) y Artificial Neural Network (ANN), utilizando los datos de los 80 puntos de contacto combinados de los sensores táctiles en las yemas de los dedos.
La capacidad de diferenciar entre las versiones correctas e incorrectas de la canción se evaluó tanto con el exoesqueleto de forma independiente como cuando una persona lo utilizaba. Los resultados obtenidos revelaron que el algoritmo ANN demostró la mayor precisión de clasificación, con un 97,13% ± 2,00% cuando se empleó con un sujeto humano, y un 94,60% ± 1,26% sin la intervención humana.
Estos hallazgos muestran el potencial de esta tecnología en la recuperación de habilidades motoras específicas, como tocar instrumentos musicales, brindando esperanza y nuevas oportunidades para las personas que buscan recuperar su destreza perdida debido a neurotraumas.
Después de sufrir un accidente cerebrovascular
Los trastornos neuromusculares representan un desafío significativo en la vida diaria de los pacientes afectados. Después de sufrir un accidente cerebrovascular u otras afecciones similares, la coordinación y la fuerza de las extremidades superiores pueden disminuir considerablemente, lo que resulta en una función limitada y debilitamiento de la mano.
Además, la espasticidad puede afectar la capacidad para realizar actividades básicas de cuidado personal, lo que agrava aún más la situación. Situaciones similares se presentan en casos de parálisis cerebral y otros trastornos neuromusculares.
Con el objetivo de abordar estos desafíos, se ha desarrollado una solución innovadora: los exoesqueletos robóticos. Sin embargo, los exoesqueletos rígidos tradicionales presentan limitaciones en cuanto a su tamaño, complejidad y comodidad para los pacientes. Para superar estas barreras, se han propuesto los exoesqueletos de actuadores neumáticos blandos, que son más ligeros, flexibles y prácticos.
Estos exoesqueletos ofrecen un soporte suave y asistencia personalizada para ayudar a los pacientes a recuperar sus habilidades motoras. En particular, el acto de tocar el piano requiere movimientos complejos y precisos. Los exoesqueletos robóticos blandos, equipados con sensores flexibles, pueden adaptarse a la forma y el movimiento de la mano, proporcionando la fuerza y la orientación necesarias para que los pacientes puedan volver a tocar el piano.
Exoesqueleto de mano inteligente y asistido
En este estudio, se presenta un exoesqueleto de mano inteligente y asistido compuesto por cinco actuadores neumáticos blandos. Cada uno de estos actuadores está equipado con un sensor flexible que consta de 16 puntos de contacto en la punta de los dedos. Este diseño suave y personalizable mejora la comodidad y la conveniencia para el usuario.
Además, la fabricación de este exoesqueleto es más sencilla, ya que los actuadores y sensores se integran en un único proceso de moldeo. Para demostrar su capacidad, el exoesqueleto se utilizó para percibir las diferencias entre versiones correctas e incorrectas de una canción tocada en el piano. Se llevaron a cabo experimentos para comparar la precisión de tres algoritmos de aprendizaje automático (RF, KNN y ANN) en la clasificación de las variaciones de las canciones.
Los resultados se obtuvieron tanto con el exoesqueleto utilizado de forma independiente como con la participación de un sujeto humano. Estos hallazgos prometedores indican el potencial de esta tecnología en la recuperación de habilidades motoras específicas, ofreciendo esperanza y nuevas oportunidades para aquellos que buscan restaurar su destreza perdida debido a trastornos neuromusculares.
Métodos experimentales buscando el exoesqueleto perfecto
Para llevar a cabo los experimentos, se reclutaron participantes voluntarios que no presentaban problemas neuromusculares. Se realizó una sesión de entrenamiento previo para familiarizar a los participantes con el exoesqueleto y el protocolo experimental.
Durante los experimentos, cada participante utilizó el exoesqueleto de mano y se le pidió que reprodujera diferentes variaciones de una canción en el piano. Los sensores flexibles integrados en las puntas de los dedos del exoesqueleto registraron los patrones táctiles y los transmitieron a los algoritmos de aprendizaje automático.
Se implementaron tres algoritmos de aprendizaje automático para clasificar las diferentes versiones de la canción: Random Forest (RF), K-Nearest Neighbor (KNN) y Artificial Neural Network (ANN). Estos algoritmos fueron entrenados utilizando los datos de los 80 taxeles combinados de los sensores táctiles en las yemas de los dedos.
Se llevaron a cabo varias repeticiones de las diferentes variaciones de la canción para obtener resultados más precisos. Se registraron las respuestas y clasificaciones obtenidas por los algoritmos para su posterior análisis.
Experimento adicionales con el exoesqueleto
Además, se realizó un experimento adicional utilizando el exoesqueleto de forma independiente, sin la participación de un sujeto humano, para evaluar su capacidad de clasificación de manera autónoma.
Se recopilaron los datos de los experimentos y se analizaron para determinar la precisión de los algoritmos en la clasificación de las variaciones de la canción. Se calculó el porcentaje de precisión promedio para cada algoritmo tanto con la intervención humana como sin ella.
Este enfoque experimental permitió evaluar la capacidad del exoesqueleto de mano para distinguir entre las versiones correctas e incorrectas de la canción. Los resultados obtenidos proporcionaron información importante sobre la eficacia de los algoritmos de aprendizaje automático utilizados y la capacidad del exoesqueleto para asistir en la interpretación del piano.
Diseño y fabricación de los sensores táctiles flexibles
Se ha desarrollado un innovador conjunto de sensores táctiles flexibles compuestos por dieciséis canales. Estos sensores utilizan dos elementos piezorresistivos principales: velostat y hilo de acero inoxidable. El velostat es una película compuesta de polietileno y negro de humo que experimenta cambios en su conductividad al aplicar presión, mientras que el hilo de acero inoxidable muestra una mayor conductividad al aplicar fuerza.
Al combinar estos elementos en un patrón de rejilla y conectarlos a una película conductora, se crea una matriz de sensores capaz de medir la distribución de la presión en su superficie.
El proceso de fabricación de estos sensores implicó la combinación de siete capas diferentes. Estas capas incluían una capa exterior, una capa adhesiva, cables longitudinales, una capa conductora, cables transversales, otra capa adhesiva y una segunda capa exterior.
Para ensamblar el sensor, se utilizaron envolturas de plástico para las capas exteriores y adhesivo de doble cara para las capas adhesivas. Los cables estaban hechos de hilo de acero inoxidable, mientras que la capa conductora estaba compuesta de velostat. Cada capa fue cortada y ajustada según el tamaño requerido.
Los cables se colocaron en una funda impresa en 3D para mantener una separación uniforme y luego se presionaron sobre las capas adhesivas. Se retiraron las capas protectoras del adhesivo y se envolvió la capa exterior alrededor del dedo. Para asegurar la conexión y protección de los cables, se soldaron y encapsularon en tubos termorretráctiles. El tamaño final del sensor resultante fue de 1,5 cm × 1 cm.
Diseño y fabricación del exoesqueleto blando para la mano
El exoesqueleto blando fue fabricado utilizando moldes diseñados con el software SolidWorks 2019. Se crearon dos moldes, uno con dimensiones adicionales para acomodar el cableado de la matriz de sensores y ranuras para los conductos de cables. También se diseñaron varillas semicilíndricas con una cavidad en un extremo para asegurar la correcta colocación de los actuadores en los moldes.
Tanto los moldes como las tapas de las aberturas de los dedos se imprimieron en 3D utilizando material PLA. Asimismo, las varillas, que actuaban como marcadores de posición para los canales de aire, se imprimieron en 3D utilizando un material soluble en agua.
El proceso de fabricación del exoesqueleto comenzó con la inserción de tubos de poliuretano a través de los orificios del molde y en los stents. Para facilitar su extracción posterior, se envolvieron los stents con teflón. Estos se colocaron dentro de las tapas, alineando su borde inferior con la base de cada dedo y corriendo paralelo a la moldura.
Se utilizó pegamento caliente para asegurar temporalmente el tubo y los stents en su lugar según fuera necesario. Luego, se llenó el molde con material de hidrogel y se dejó curar durante 4 horas antes de limpiar cualquier exceso de material.
Fabricación y preparación con Dragon Skin
Antes de moldear la capa exterior de Dragon Skin, se colocó una pieza rectangular de tela como refuerzo sobre la base plana de cada dedo. A continuación, se envolvió una cinta de fibra de carbono en un patrón helicoidal alrededor del yeso de silicona. La fibra se envolvió desde la base del dedo hasta la punta y luego desde la punta hasta la base, intersecándose en el vértice del lado dorsal y a lo largo del lado palmar. Este proceso se llevó a cabo para fortalecer y estabilizar la estructura del exoesqueleto de la mano.
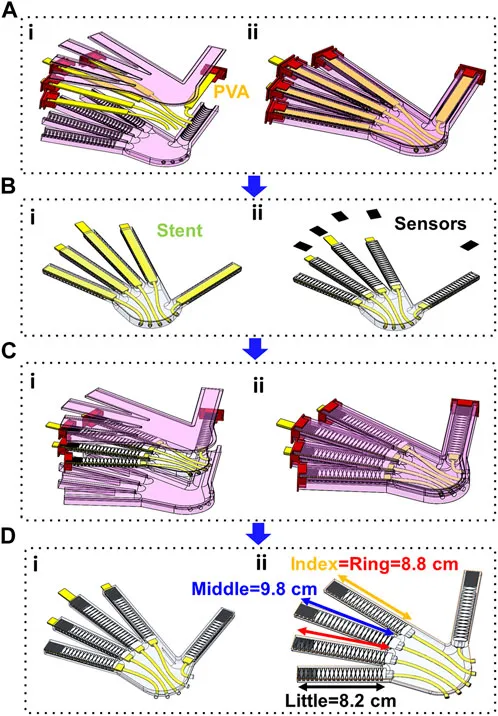
FIGURA 2 – Proceso de fabricación: (A) (i) Todos los componentes impresos en ensamblaje CAD, yeso hecho a partir del molde 1, stents de PVA y tubos, (ii) El yeso completo de la etapa 1, que se muestra después de rellenar con Dragon Skin y sellar.
(B) (i) Resultado del molde de la etapa 1, (ii) El molde está equipado con capas limitadoras de tensión y conjuntos de sensores de presión.
(C) (i) El yeso completamente equipado se coloca en el molde de la etapa 2 para recubrir las capas limitadoras de tensión y los sensores como parte del exoesqueleto, (ii) El yeso completo de la etapa 2, que se muestra después de llenarlo con Dragon Skin y sellarlo.
(D) (i) Resultado del yeso de la etapa 2, (ii) se disuelven los stents de PVA y se realiza el yeso de la etapa 3 para sellar las cámaras de presión.
Sensores táctiles flexibles para buscar la efectividad
En esta etapa del proceso, se procedió a soldar los cables verticales en su lugar en el extremo de cada dedo. Para facilitar la movilidad durante esta tarea, los cables de cada sensor se separaron en dos grupos (transversal y longitudinal) y se cubrieron con termorretráctil. Cada sensor constaba de ocho cables que se dirigían hacia la palma de la mano y se conectaban a un conector de cable de 40 pines.
Los tubos y el cableado se colocaron cuidadosamente en las ranuras del molde y se llenaron con el material de Dragon Skin, permitiendo que se curara durante 4 horas. Una vez que el material había curado, se realizaron las soldaduras de los cables horizontales de los sensores a los cables correspondientes del conector de 40 pines.
En la siguiente etapa del proceso de moldeo, se procedió a recortar el exceso de goma alrededor de cada dedo, dejándolo con una longitud uniforme de 3 mm desde el borde de la matriz de sensores. Los stents de PVA se disolvieron en agua y se eliminó el teflón de la superficie interior.
Posteriormente, el extremo de cada dedo se sumergió en una copa con Dragon Skin, y después de un período de curado de 4 horas, se eliminó el exceso de material para obtener una tapa de Dragon Skin que sellaba completamente las cámaras neumáticas.
En el lado de la palma de la mano donde se encontraban los tubos, se realizó un corte, dejando una capa de goma de silicona alrededor de los tubos. Para garantizar un cierre hermético, se colocó una brida alrededor de la entrada de cada actuador de dedo. Cualquier espacio vacío restante se rellenó con Dragon Skin mediante un proceso de moldeo abierto.
Características y particularidades de cómo deben actuar las partes blandas
Para evaluar el desempeño de los actuadores suaves, se llevaron a cabo pruebas para medir la respuesta de fuerza y la histéresis. Se utilizaron tres niveles de presión interna diferentes y se midió la fuerza en las yemas de los dedos de forma individual, empleando una celda de carga de 2 kg. Cada prueba consistió en 16 ciclos, con una activación de 3 segundos seguida de un período de descanso de 7 segundos.
Estos 16 ciclos se registraron en tres ocasiones, utilizando presiones de 0,14, 0,21 y 0,28 MPa. Las fuerzas y presiones obtenidas durante estas pruebas se utilizaron para trazar la curva de histéresis para cada una de las tres presiones. Asimismo, se determinó la fuerza máxima alcanzada a cada una de las presiones mencionadas, basándose en la relación entre fuerza y presión para cada dedo.
El sistema de percepción y acción del exoesqueleto
Este se configuró mediante el uso de un microcontrolador Teensy 4.0 y un tablero multiplexor para muestrear los 16 taxeles en cada yema de los dedos. Para obtener la información de cada taxel, se utilizó la resistencia correspondiente en un circuito de amplificador operacional no inversor. A continuación, se midió el voltaje de salida de dicho circuito para cada uno de los 16 taxeles en cada dedo del exoesqueleto, con una frecuencia de muestreo de 74 Hz.
Con el fin de abarcar los 80 taxeles disponibles, se implementó el multiplexor, permitiendo así el muestreo del voltaje de salida del circuito de amplificador operacional diez veces por taxel. El microcontrolador Teensy se encargó de promediar los datos obtenidos.
Estos datos se publicaron en una red del sistema operativo de robot (ROS, por sus siglas en inglés) desde el microcontrolador Teensy. Además, se estableció una conexión entre Simulink y la misma red ROS, lo que permitió la visualización y el almacenamiento en tiempo real de los datos obtenidos. De esta manera, se logró configurar el sistema de percepción y acción del exoesqueleto de manera efectiva.
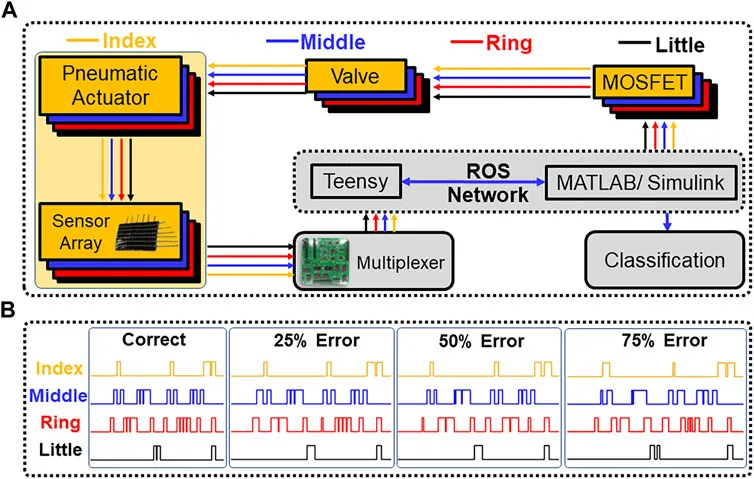
La figura 3 muestra el sistema de control utilizado para el exoesqueleto y los sensores
En el esquema de control (A), se puede observar la implementación en Simulink de las 10 variaciones de canciones, donde se controlan las válvulas de los cuatro dedos del exoesqueleto. Para generar las entradas de control, se utilizó el bloque generador de señales de Simulink, configurado como cuatro salidas digitales separadas que representan las señales de control de las válvulas.
Estas salidas se conectaron a un MOSFET (NTE2389), el cual actuaba como interfaz para controlar las señales de 24 V destinadas a las cinco electroválvulas Festo (MHE2-MS1H-3) encargadas de controlar los dedos del exoesqueleto. Un único depósito de presión a 0,28 MPa se conectó a las cinco válvulas, y el estado abierto o cerrado de cada válvula se determinó mediante las salidas de 1 V de Simulink. Estas salidas controlaron la presión aplicada dentro de los actuadores neumáticos del exoesqueleto.
En la figura 3 (B), se muestran ejemplos ilustrativos de las señales de control de las válvulas para tocar la canción «Mary Had A Little Lamb». Se representan la versión correcta de la canción y las variaciones en las que se introdujeron errores. El sistema de control desarrollado permitió la generación precisa de las señales de control necesarias para reproducir diferentes variantes de canciones y controlar adecuadamente los movimientos de los dedos del exoesqueleto.
El exoesqueleto de la mano puede ayudarte mucho a la rehabilitación
El exoesqueleto de mano inteligente se utilizó como herramienta de rehabilitación para aprender a tocar el piano. Se programó para reproducir diez variaciones de la canción «Mary Had a Little Lamb», incluyendo errores intencionales que imitaban posibles errores cometidos al tocar. Estos errores se combinaron de diferentes formas para crear 12 escenarios de error únicos.
Las diez variaciones de canciones se dividieron en tres grupos con diferentes cantidades de errores: 75%, 50% y 25% de teclas con errores respectivamente. Cada grupo contenía tres variaciones con errores en la misma nota, pero con tipos de error seleccionados al azar. Además, se incluyó la canción correcta sin errores.
El estudio consistió en realizar 20 repeticiones de cada una de las diez variaciones de canciones en dos escenarios: con el exoesqueleto de mano utilizado por un sujeto humano y con el exoesqueleto reproduciendo las canciones de forma independiente, sin la intervención de una persona. Se obtuvieron conjuntos de datos de estas repeticiones para entrenar tres algoritmos de clasificación de aprendizaje automático: KNN, RF y ANN.
Estos algoritmos se evaluaron en su capacidad para distinguir entre las diferentes variaciones de canciones
El objetivo de este enfoque es proporcionar retroalimentación en tiempo real a las personas que están en proceso de recuperación después de un accidente cerebrovascular u otro tipo de neurotrauma y que están aprendiendo o reentrenando sus habilidades en el piano u otro instrumento musical. El estudio se llevó a cabo siguiendo los protocolos éticos y con el consentimiento informado del sujeto humano participante.
¿Cómo podemos clasificar los métodos de aprendizaje automáticos?
Para abordar el problema de clasificación de las variaciones de canciones, se utilizaron tres algoritmos de aprendizaje automático: KNN, RF y ANN. Se recopilaron 20 repeticiones de cada variación de canción y se etiquetaron los datos recopilados para entrenar los algoritmos.
El algoritmo KNN calcula la distancia entre una consulta y los puntos en las características y selecciona los k vecinos más cercanos para votar por la etiqueta de clase más frecuente. Por su parte, el algoritmo RF utiliza una estructura de árbol entrenada por separado para clasificar los datos. Cuantos más árboles se utilicen, mayor será la precisión de la clasificación.
El algoritmo ANN utiliza una red neuronal de avance de dos capas con neuronas sigmoideas ocultas y una neurona de salida softmax. Se entrenó utilizando el método de retropropagación de gradiente conjugado escalado y se evaluó utilizando matrices de confusión y entropía cruzada.
Se dividieron los conjuntos de datos en conjuntos de entrenamiento y prueba para cada algoritmo. Para KNN y RF, se utilizó una división del 80% de datos para entrenamiento y el 20% restante para prueba. Para ANN, se utilizó una división del 70% de datos para entrenamiento, el 15% para validación y el 15% para prueba.
Se realizaron diez iteraciones para cada variación de canción, utilizando selecciones aleatorias de datos de entrenamiento y prueba. Se calculó la precisión de clasificación promedio y la desviación estándar para cada algoritmo.
Se realizó un análisis de varianza de dos factores (ANOVA) para analizar la influencia del algoritmo de clasificación y si el exoesqueleto de mano era utilizado por una persona o de forma independiente en la precisión de clasificación. Se consideró un valor de p de 0.01 para determinar la significancia estadística.
El rendimiento de los distintos tipos de de actuadores
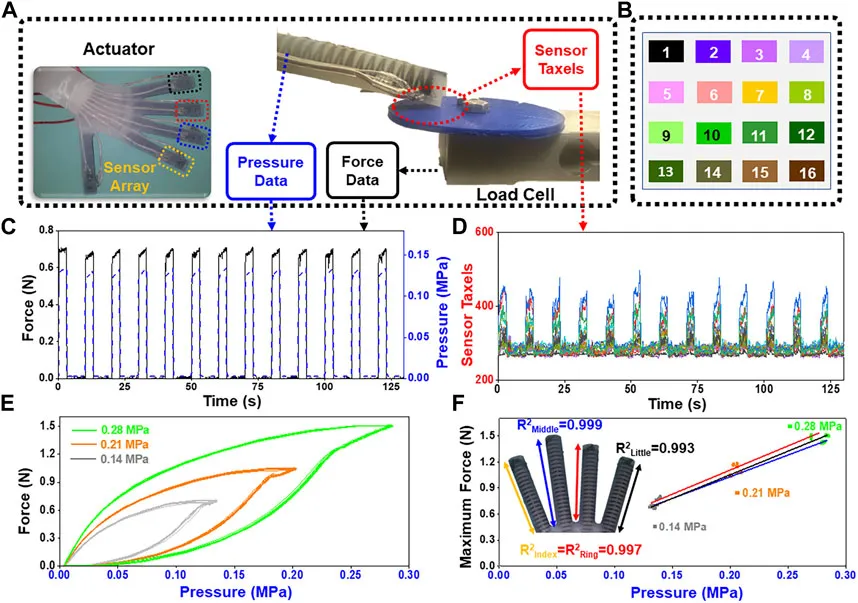
Los resultados mostraron que las respuestas de los actuadores suaves fueron altamente repetibles en las tres presiones aplicadas. A una presión de 0,14 MPa, la fuerza máxima promedio en la punta de los dedos fue de 0,72 N, con una desviación estándar de 0,04 N. A una presión de 0,21 MPa, la fuerza máxima promedio fue de 1,10 N, con una desviación estándar de 0,05 N. Y a una presión de 0,28 MPa, la fuerza máxima promedio fue de 1,47 N, con una desviación estándar de 0,04 N.
Los datos ilustrativos de los sensores táctiles en la yema de un dedo mostraron la respuesta del sensor ante fuerzas repetidas aplicadas a la celda de carga. Se observó una histéresis característica en los actuadores en relación con cada presión interna.
Además, se encontró una correlación casi lineal entre las fuerzas máximas generadas en las yemas de los dedos y el aumento de la presión aplicada dentro del rango probado. Se ajustó un modelo lineal a estos datos, obteniendo valores de R^2 de 0,993 para el dedo meñique, 0,997 para el dedo anular y 0,999 para el dedo medio. Estos resultados demuestran la precisión y consistencia de los actuadores suaves en la generación de fuerzas en respuesta a diferentes presiones internas.
¿Qué podemos ver en las figuras anteriores?
4A: En esta figura se muestra el exoesqueleto de la mano equipado con un sensor de presión interna que aplica fuerzas a una celda de carga.
4B: Se presenta un mapa a color que ilustra la disposición espacial de los 16 taxeles en el sensor de cada dedo del exoesqueleto.
4C: Muestra la fuerza medida por la celda de carga en el dedo meñique a una presión interna de 0,14 MPa.
4D: Se presentan las señales de los taxeles correspondientes a la presión de 0,14 MPa, mostrando cómo varían en respuesta a la presión aplicada.
4E: Muestra la relación entre la fuerza generada en la punta del dedo meñique y la presión interna utilizada, utilizando 16 ciclos de actuación del dedo para tres presiones internas diferentes.
4F: Ilustra la correlación casi lineal entre las fuerzas máximas generadas en la punta de los dedos y el aumento de la presión en el rango probado.
Experimentando el ritmo y la precisión de la clasificación al tocar el piano
El equipo logró un avance significativo al desarrollar un exoesqueleto de mano robótica suave capaz de reproducir de manera impecable las 10 variaciones de una canción, ya sea de manera autónoma o cuando es utilizado por un usuario. En la figura 5A (i), se puede apreciar la mano en funcionamiento de manera independiente, pulsando las teclas con destreza.
A continuación, en la figura 5B, se presentan los datos recopilados durante la reproducción autónoma, seguidos de los datos obtenidos mientras un usuario utiliza el exoesqueleto en la figura 5C.
Con el propósito de brindar una mayor claridad, las figuras 5B (ii) y 5C (ii) muestran dos sensores táctiles (taxeles) representativos de cada dedo. En las figuras 5B (iii) y 5C (iii), se muestra la respuesta normalizada de los 16 taxeles del dedo meñique durante una sola pulsación de tecla, tanto en la situación autónoma como cuando se utiliza el exoesqueleto de la mano.
Estos datos permiten realizar comparaciones y análisis exhaustivos de las respuestas de los sensores táctiles en ambos escenarios: la reproducción independiente y el uso del exoesqueleto.
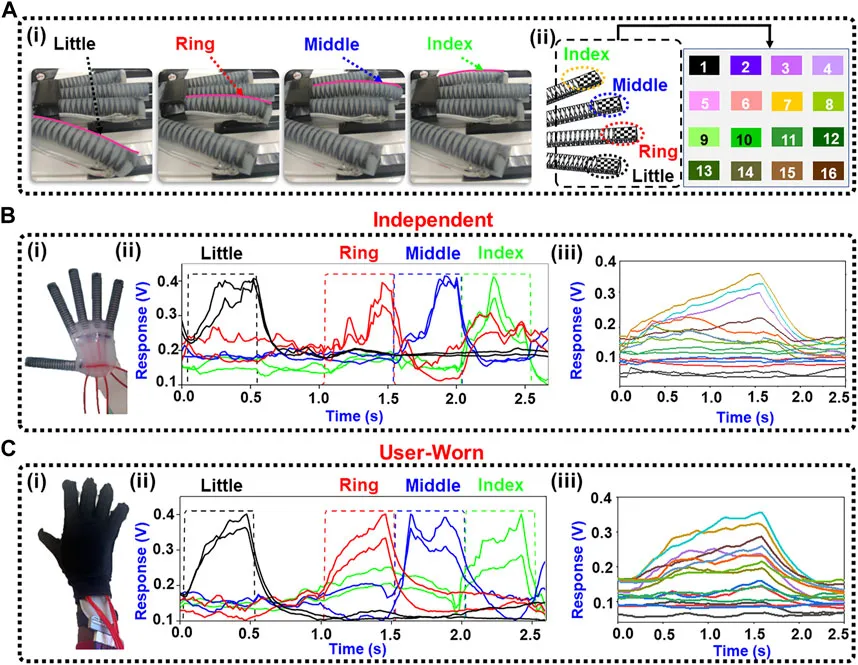
FIGURA 5: El Exoesqueleto en Acción: Tocando el Piano de Manera Autónoma y con un Usuario
(A) (i) Visualización del desempeño de cada dedo al tocar una canción.
(ii) Mapa de colores que muestra la distribución de los sensores táctiles (taxeles) en cada dedo.
(B) (i) Representación del exoesqueleto siendo utilizado de forma autónoma.
(ii) Ilustración de dos taxeles representativos para cada dedo durante la interpretación de la canción.
(iii) Respuesta normalizada de todos los taxeles del dedo meñique durante una sola pulsación de tecla.
(C) (i) Representación del exoesqueleto integrado en un guante y utilizado por un usuario.
(ii) Ilustración de dos taxeles representativos para cada dedo.
(iii) Respuesta normalizada de todos los taxeles del dedo meñique durante una sola pulsación de tecla.
¿Cómo se evaluó el rendimiento de los algoritmos de clasificación?
Echemos un vistazo a la fascinante figura que nos muestra cómo se desenvuelve el exoesqueleto de la mano, tanto cuando trabaja en solitario como cuando se utiliza con la ayuda de un usuario. En esta representación visual, podemos apreciar los mapas de colores que nos indican la ubicación exacta de los sensores táctiles (taxeles) en cada uno de los dedos.
Además, se nos muestra una representación de dos taxeles ejemplares por dedo, junto con la respuesta normalizada de todos los taxeles del dedo meñique durante una única pulsación de tecla.
Pero, ¿cómo se evaluó el rendimiento de los algoritmos de clasificación? Pues bien, se utilizó la precisión de clasificación como medida. Sorprendentemente, la red neuronal artificial (ANN) obtuvo la mayor precisión, con un promedio de 94,60 % ± 1,26 % cuando el exoesqueleto trabajaba de forma independiente, y un impresionante 97,13 % ± 2,00 % cuando era utilizado por una persona (Figuras 6A, B).
Por otro lado, el algoritmo de Bosque Aleatorio (RF)
Este logró una precisión media del 91,00 % ± 2,11 % en el uso independiente y del 94,77 % ± 1,96 % cuando se utilizó con ayuda de un usuario. Sin embargo, el algoritmo de Vecinos más Cercanos (KNN) obtuvo la precisión más baja, con un promedio del 83,30 % ± 2,45 % en el uso independiente y del 90,70 % ± 1,48 % cuando contó con la colaboración de una persona (Figura 6C).
Los resultados del análisis de varianza de dos factores (ANOVA) nos revelan diferencias significativas entre los distintos algoritmos de clasificación (p < 0,01). Asimismo, se observó una diferencia estadísticamente significativa en cuanto a la precisión entre el uso independiente y el uso con la intervención de una persona (p < 0,01). Además, se encontró un efecto de interacción significativo entre ambas variables independientes (p < 0,01).
Estos interesantes hallazgos nos indican que los algoritmos difieren en su capacidad para clasificar las variaciones de las canciones y que el rendimiento de clasificación puede verse afectado según se utilice el exoesqueleto de forma independiente o con la ayuda de una persona.
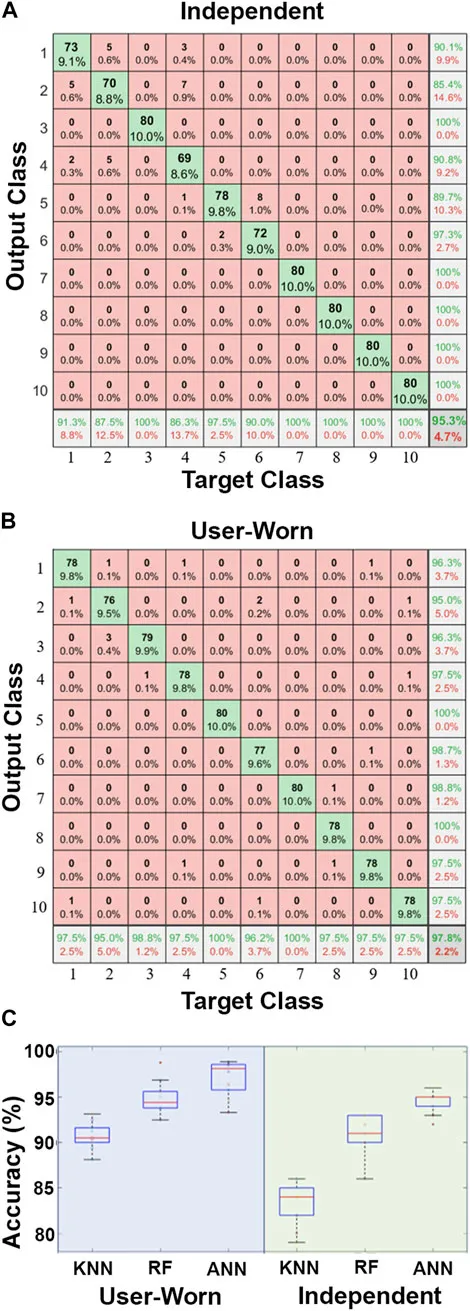
FIGURA 6: Evaluación del rendimiento de los algoritmos de clasificación con el exoesqueleto robótico suave.
(A) Matrices de confusión ilustrativas para la red neuronal artificial (ANN) que muestran la precisión en la clasificación de las 10 variaciones de canciones durante el uso independiente.
(B) Matrices de confusión ilustrativas para la ANN durante el uso del exoesqueleto por parte de un usuario.
(C) Comparación de tres algoritmos de clasificación durante el uso independiente y con un sujeto humano utilizando el exoesqueleto robótico suave. Se observa que la ANN alcanzó una precisión significativamente mayor que los algoritmos KNN y RF.
Sensores táctiles y algoritmos de aprendizaje automático
En resumen, se ha desarrollado un exoesqueleto de mano inteligente que utiliza actuadores blandos, sensores táctiles y algoritmos de aprendizaje automático para rehabilitar y mejorar las habilidades motoras después de un neurotrauma. El diseño innovador del exoesqueleto incorpora materiales impresos en 3D y hidrogel para lograr un dispositivo portátil y personalizado. Los sensores táctiles flexibles en cada dedo permiten una detección precisa de las interacciones con el entorno. Se utilizó inteligencia artificial para clasificar las variaciones de canciones tocadas en el piano.
Los resultados muestran que la red neuronal artificial (ANN) tuvo la mayor precisión de clasificación, seguida por los algoritmos RF y KNN. El rendimiento de clasificación fue notablemente mejor cuando el exoesqueleto fue utilizado por una persona en comparación con el uso independiente. Esto indica que la interacción entre el exoesqueleto y la mano humana puede mejorar la precisión de clasificación.
Este enfoque tiene un amplio potencial en la rehabilitación de diversas lesiones y discapacidades, y puede adaptarse para otras tareas de la vida diaria. La capacidad de detectar y corregir errores en tiempo real es especialmente beneficiosa en programas de rehabilitación personalizados. Además, el diseño flexible y personalizable del exoesqueleto blando permite adaptarse a las necesidades individuales de los pacientes.
Sin embargo, existen áreas que merecen ser investigadas en futuros estudios
Sería importante explorar el efecto de la biomecánica de diferentes usuarios en la respuesta del exoesqueleto blando. También se pueden investigar diferentes formas de proporcionar retroalimentación durante el entrenamiento, como retroalimentación visual o háptica. Además, se puede considerar la incorporación de retroalimentación vibrotáctil para alertar a los usuarios sobre posibles errores.
En general, este trabajo representa un avance significativo en el campo de la rehabilitación mediante el uso de exoesqueletos inteligentes. Demuestra el potencial de combinar tecnologías avanzadas para mejorar las habilidades motoras y brindar apoyo en el proceso de recuperación de las personas afectadas por neurotraumas.
Resumiendo la técnica para recuperar habilidades motoras tras neurotrauma
En resumen, se ha desarrollado un exoesqueleto blando con sensores táctiles integrados para la detección de variaciones en la interpretación de una canción en el piano. Los resultados muestran que el algoritmo de red neuronal artificial (ANN) alcanzó la mayor precisión, con tasas de éxito del 97,13% ± 2,00% cuando se utilizó con un sujeto humano y del 94,60% ± 1,26% en uso independiente.
Además, se ha introducido una técnica de fabricación innovadora utilizando stents de PVA impresos en 3D e hidrogel para crear un exoesqueleto de mano portátil con cinco actuadores. Estos avances representan importantes contribuciones al campo de los exoesqueletos y ofrecen nuevas posibilidades en la rehabilitación y mejora de las habilidades motoras.
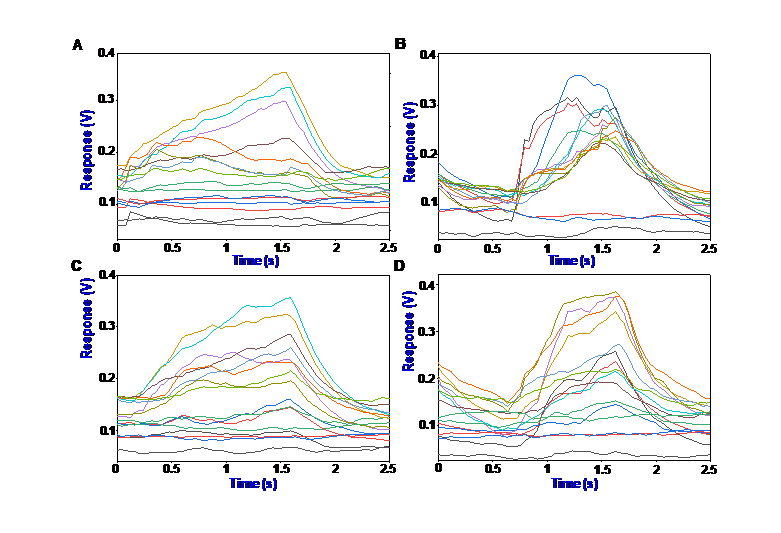
Se analizó la respuesta de todos los taxeles del dedo meñique durante una sola pulsación de tecla en diferentes situaciones:
A. Durante la interpretación correcta de una nota en la canción, cuando el exoesqueleto se utilizó de forma independiente.
B. Durante variaciones incorrectas de la canción, también cuando el exoesqueleto se utilizó de forma independiente.
C. Durante la interpretación correcta de una nota en la canción, cuando el exoesqueleto fue utilizado por el sujeto humano.
D. Durante variaciones incorrectas de la canción, cuando el exoesqueleto fue utilizado por el sujeto humano.
Estos análisis permitieron examinar y comparar las respuestas de los taxeles en distintas situaciones, tanto en el uso independiente como cuando el exoesqueleto fue utilizado por una persona.
Veamos el exoesqueleto en acción
Puedes ver más información y dejar tus comentarios en el foro, sigue leyendo…