
Nvidia gana el premio al reconocimiento de patrones. Un emocionante logro ha sido alcanzado por Nvidia en el campo de la conducción autónoma de vehículos. Durante la próxima Conferencia de reconocimiento de patrones y visión por computadora (CVPR) en Vancouver, Canadá, Nvidia será anunciado como el ganador del altamente competitivo Desafío de predicción de ocupación 3D.
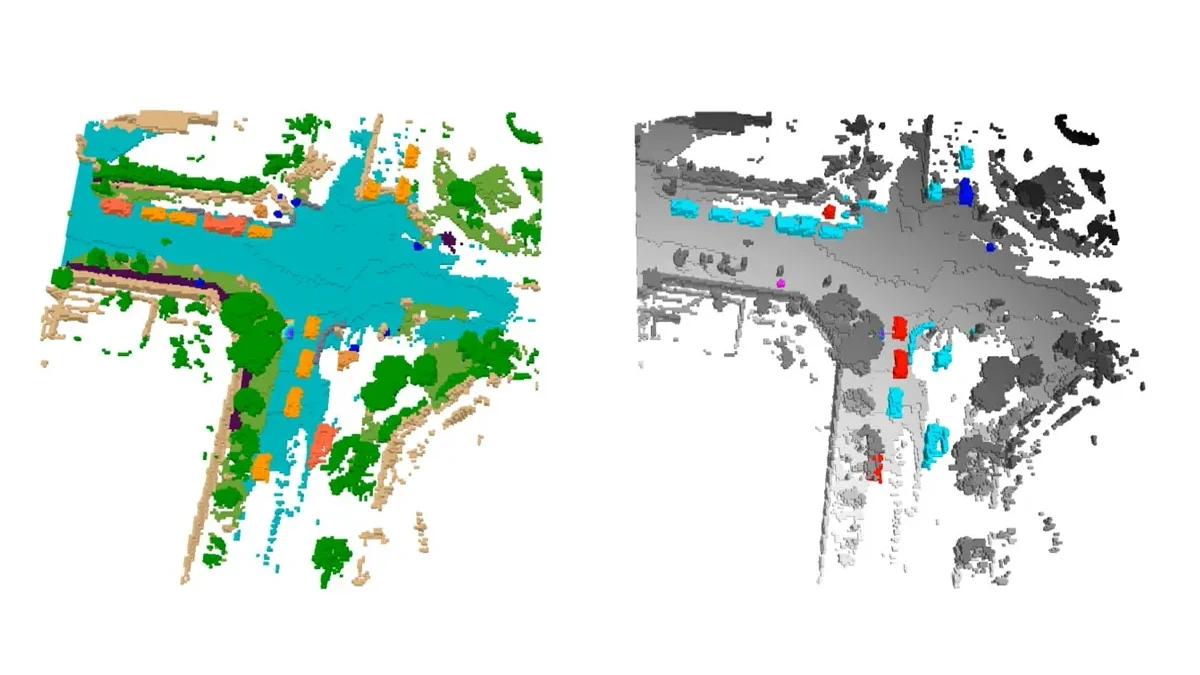
Esta competencia ha atraído a más de 400 presentaciones provenientes de casi 150 equipos ubicados en diversas regiones. El objetivo de este desafío es predecir el estado de cada vóxel en una escena tridimensional, es decir, determinar si cada punto de datos en una cuadrícula de vista de pájaro 3D está libre, ocupado o desconocido.
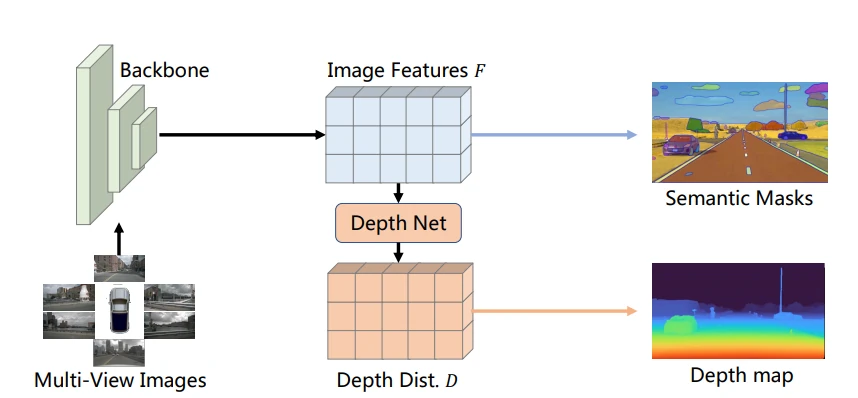
La predicción precisa de la ocupación en 3D es fundamental para el desarrollo de sistemas autónomos seguros y confiables. Nvidia ha utilizado redes neuronales convolucionales de última generación y modelos de transformadores habilitados por su plataforma DRIVE para brindar información crucial a los sistemas de planificación y control de vehículos autónomos (AV).
Predicción de dónde estarán los obstáculos para vehículos
Zhiding Yu, científico investigador sénior de aprendizaje y percepción en Nvidia, ha compartido dos avances importantes logrados en el ámbito de los vehículos autónomos. En primer lugar, han desarrollado un modelo de última generación que ofrece una excelente percepción desde una vista de pájaro. Además, han demostrado la eficacia de los modelos visuales básicos que cuentan con hasta mil millones de parámetros y se han entrenado a gran escala para predecir la ocupación en 3D.
En los últimos años, la percepción en la conducción autónoma ha evolucionado desde tareas en 2D, como la detección de objetos o espacios libres en imágenes, hacia un razonamiento en 3D utilizando múltiples imágenes de entrada. Esto ha permitido una representación detallada, flexible y precisa de los objetos en escenas de tráfico complejas, lo cual resulta fundamental para cumplir con los requisitos de seguridad en la conducción autónoma, según José Álvarez, director de investigación aplicada en AV y científico distinguido en Nvidia.
Conducción autónoma de extremo a extremo de CVPR
Zhiding Yu presentará el trabajo destacado del equipo de investigación de Nvidia en el Taller de conducción autónoma de extremo a extremo de CVPR, así como en el Taller de conducción autónoma centrado en la visión. Además de obtener el primer lugar en el desafío, Nvidia será galardonado con el Premio a la Innovación durante el evento, en reconocimiento a sus nuevos conocimientos en el desarrollo de módulos de transformación de vistas que han logrado mejoras significativas en el rendimiento en comparación con enfoques anteriores, según el comité del taller CVPR.
Si deseas obtener más detalles técnicos, puedes acceder al documento aquí. Tienes más información en el foro, donde también puedes dejar tus comentarios, sigue leyendo…